
What Is Real-Time SOA?
By Stan Schneider, Ph.D.
Real-Time Innovations, Inc.
385 Moffett Park Drive
Sunnyvale, CA 94089
June 2010
Real-Time Innovations, Inc. 2 Copyright © 2010
Synopsis:
Integration effort and risk grow dramatically with system and team size. Connecting large systems
developed by independent teams at different times requires connecting multiple systems, thus
creating a “system of systems”. Enterprise systems use a design called Service Oriented Architecture
(SOA) to effect this integration. However, the technologies used in the enterprise do not apply well
to real-time systems; they cannot handle the strict delivery and timing requirements.
So what is “Real-Time SOA”? Ideally, it is an architecture that, like Enterprise SOA, can effectively
integrate large systems of systems. However, unlike Enterprise SOA, Real-Time SOA must handle
demanding real-time systems, connecting them with each other and with enterprise technologies.
The Object Management Group (OMG) Data Distribution Service (DDS) standard provides the right
substrate. However, as a peer-to-peer protocol, DDS cannot automatically mediate between
multiple systems. With the right technology to route between DDS systems, we can integrate
multiple applications built by different teams. Adding in adapters to other protocols and enterprise
technologies allows connecting much larger systems.
This paper outlines how to apply SOA principles to create a fast, distributed system of systems based
on DDS. The system can include both real-time and enterprise-class functionality.
How critical is integration?
On Nov 2, 2006, the Navy intentionally sank the AEGIS cruiser Valley Forge. It was the 4
th
Ticonderoga-class AEGIS cruiser to be built, in service for only 18 years. It was designed to serve
at least three decades.
So what happened? The hull was sound. The engine and major components were serviceable.
However, the system software could not integrate new technology and modern weapons.
Shockingly, upgrading the software cost too much to justify the continued existence of a billion-
dollar asset
i
. So, down it went.
How could this happen? Integrating complex systems is difficult, made even more so by the
challenge of coordinating teams working on different subsystems. In the past, the only way to
make this work was to have the entire system built under the direct control of a single
organization, known as “stovepiping”. Stovepiping is expensive, and worse, it does not
encourage designs that can evolve. Thus, integration and maintenance costs balloon. In the
case of the Valley Forge, those costs were more than the ship was worth. And the Valley Forge
is hardly an isolated case. Integration costs for real-time systems are out of control in many
industries.
This cannot continue.

Real-Time Innovations, Inc. 3 Copyright © 2010
The integration problem
Integration effort and risk grow dramatically with system and team size. Very small teams
require no particular effort beyond informal communication. If the team grows to ten
programmers, they need weekly meetings to review progress, interfaces, and design changes. A
team of a hundred must divide into groups. Design documents, reviews, and project
management become important.
By the time a team grows to 1000 people, it faces all the stresses that dominate large-company
projects. The project may even include multiple organizations. Now, the interfaces must be
negotiated in detail. Technology selection becomes a political nightmare. Full-team design
reviews become the critical milestones. Integration dominates the system cost, especially if you
include the overhead of processes and pre-work. Even minor changes require careful
documentation, schedule slips, and additional payments.
If you add in the time factor, things get worse. Large systems are developed and maintained in
pieces over time. That means that old technologies and designs must somehow interface with
new versions. If the original design didn’t do a good job defining the interfaces, this can be fatal.
Mistakes like creating “custom” versions of software (a real temptation with open source)
prevent upgrades to the latest versions of fundamental infrastructure. Without the latest
platforms, all dependent technologies must be ported or adapted. “Reuse” is a never-realized
dream. Instead of upgrading gracefully, contractors charge hundreds of millions for seemingly
simple refreshes.
Simply put, integration costs dominate large system development. It gets worse, not better,
during the maintenance phase.
Figure 1: Integration Costs Explode as Systems Grow
Integration grows dramatically with system size. The cost and risk of building and
maintaining large systems is completely dominated by integration.
Real-Time Innovations, Inc. 4 Copyright © 2010
The fundamental problem: coupled development
So why is this? The root cause is quite obvious. Systems are made of modules. Different teams
make the modules. As teams get large, communication (and agreement) gets much more
difficult.
Thus, large teams can only effectively build systems from independently designed,
independently implemented, independently managed modules that can evolve independently
over time.
But, that’s easier said than done. It implies that we can integrate modules not designed to work
together. And that’s Not Easy.
Integrating real-time systems
Our first challenge is to put together high-performance real-time distributed systems from
independent modules.
Figure 2 shows typical designs with traditional “client server” or “remote object” technologies,
such as CORBA, ODBC, RMA, OPC, etc.. The development process is to first determine functional
boundaries, then design access methods and interfaces for each piece of information. The data
is “hidden” behind object abstractions. Data requirements of each device or processing
endpoint are considered only as an afterthought. For larger systems, developers then decide
what information will reside on which servers, and where to put the servers and clients.
This design assumes the network is relatively static, servers are always present and accessible,
the server/client relationships are clear, clients know where and—most importantly—when to
request data, and all nodes have similar delivery requirements. It also assumes a “synchronous”
processing model; clients request service and then wait for a reply. This "server centric" design
quickly breaks down as complexity grows. It’s hard to add new data flows (red lines). Every
server is essentially coupled to every client. Unless the access methods happen to provide
everything needed, every single interface the new component touches must be reworked.

Real-Time Innovations, Inc. 5 Copyright © 2010
Figure 2: Traditional OO Designs Lead to Tightly Coupled Networks
Traditional technologies require developers to define access methods for each function,
and then implement servers and other special interfaces. This leads to “spaghetti”
network design and “stovepipe” systems
ii
.
Data-centric design, in Figure 3, offers an alternative. With data-centric design, developers
specify only the data requirements—inputs and outputs—of each subsystem. This is the exact
opposite of the above approach; rather than hiding data, designers specify exactly what
information flow affects each module. Integration middleware discovers the producers and
consumers of information and provides the data immediately when needed. This “data-centric
publish subscribe” design eliminates coupling and greatly simplifies integration of systems with
demanding or complex data-sharing requirements. Driven by the rapid adoption of the Object
Management Group (OMG) Data Distribution Service (DDS) standard, many fielded systems are
using this approach. DDS is the planned future integration technology of most military systems
in the US and its allies. Its use is also spreading into many other applications, including financial
trading, automotive driver assistance, air-traffic control, and electrical power generation.
Figure 3: Data Centric Design Implements an Abstract “Bus”
DDS Data Centric Publish Subscribe specifies the interfaces and information model
crisply. With clear interface specifications, components can be plugged into an
information bus.
Real-Time Innovations, Inc. 6 Copyright © 2010
Plugging in components sounds simple, but it is not trivial
The key benefit of DDS is that you can “plug in” new modules without redesigning other
interfaces (red line in the figure). That looks simple, but it is anything but obvious how to do
that. Having a pluggable interface assumes that the “bus” specification captures all the key real-
time constraints: What is the data? When is it available? When is it needed? What happens if
it’s not on time? Are there backup sources? How are they engaged? It also makes a huge
assumption that adding more load will not affect the overall system performance; if it does,
other components can fail even if there is no direct connection. That’s an insidious type of
indirect coupling.
At a high level, participants on a DDS bus just subscribe to the information they need and
publish what they produce. Information is identified by “Topics”, and is strongly typed for safety
and easier integration. The middleware automatically “discovers” new entrants. Types are
communicated before information flow begins, so all modules know what they’re getting (called
being “content aware”). And because data can flow without servers or synchronization delays,
the system is blazingly fast; DDS is easily the highest-performance middleware standard
iii
.
But perhaps the key to the success of DDS is that it crisply defines an information model.
Fundamentally, if you define the information model correctly, then components can specify
their needs at design time. At runtime, they then produce and consume via the model,
implemented by the middleware. The modules are not directly dependent on each other. This
is the key to avoiding coupling. The components adapt to the model, not the other way around.
Other messaging technologies (e.g JMS) can’t do this because they don’t define an information
model
iv
.
DDS defines the information model with over 20 “quality of service” (QoS) parameters. QoS
settings stipulate if a publisher can supply reliable information flow, how fast it can supply data,
and when you will find out if it’s up or down. A subscriber can specify exactly what it needs,
even down to filtering out updates based on timing or the content of the message. The
middleware then looks at requests from “plugged in” subscribers, and decides if any publishers
can satisfy those requests. If so, it establishes “contracts” between the publisher and subscriber
and starts sending data. If not, it reports an error. An example contract might be, “The
publisher will update the subscriber at least every millisecond, and the communication must be
reliable, so retry to repair transmission errors. If the publisher fails, switch to a backup.”
That’s a small example. The full set of DDS QoS parameters can integrate hundreds of very
complex, demanding applications. And because the middleware is fast, the specifications can be
set to satisfy very demanding real-time requirements. Fielded DDS systems send up to millions
of messages per second, with latencies measured in the tens of microseconds, through millions
of publish-subscribe pairings. Designers can specify timing requirements, supporting systems
that have deterministic delivery needs. Reliable multicast ensures that new “plug ins” don’t
burden the system. It scales well; applications comprising up to 1000 computers are deployed.
Real-Time Innovations, Inc. 7 Copyright © 2010
DDS particularly excels when the application needs non-stop reliability, such as a in a battle
management or an electrical grid system.
Radar example
QoS contracts are made on a per-data-flow-path basis. So, for instance, consider a high-speed
radar application that publishes “tracks” to many different subscriber applications. It must send
updates 2000 times a second to a weapon system trying to track incoming missiles. For this
subscriber, the latest data is best, so if a sample is lost due to a transmission error, don’t waste
time retrying old data. At the same time, a logging system needs the radar to reliably deliver
everything being tracked for later analysis. At the same time, this data should be multicast to 50
operator screens, but they can only take 10 samples a second. Each screen may further select a
region of interest, e.g. display only tracks within 5 miles, coming towards me, and only things
that are not identified as friendly.
DDS can handle all this and more. All at the same time. And, because these issues are being
managed by the middleware, the application can simply focus on logic and processing.
Of course, all these issues are handled behind the scenes by the middleware. It doesn’t impact
the application. You can imagine how much this simplifies application development and
integration.
Now, suppose all this is working and deployed. And then we need to add a new capability. For
instance, let’s use our radar to coordinate air traffic in our local area. Since every service has
crisply defined its capabilities, we don’t require any change to any components. The new
application simply plugs in and works.
Of course, this assumes performance is not affected by loading. DDS implementations vary in
their ability to scale, but those that implement direct peer-to-peer reliable multicast suffer very
little performance hit with higher offered load. Implemented well, DDS is orders of magnitude
faster than other middleware designs. And the “QoS contract” concept adds a layer of failure
detection. If new load does cause an overload, the middleware will immediately notify the
other applications that their contracts were violated. That helps find design issues early, during
system test. It also allows live systems to take effective remedial action, should this occur
during operation.
Integrating systems of systems
So, to summarize the above, DDS’s data-centric publish subscribe connects real-time systems.
It’s the right architecture for these applications; it defines interfaces, timing, and QoS control.
Everything is decentralized for redundancy and speed.
However, it’s not the whole story. Large systems that must be developed and maintained over
many years must be able to combine without any premeditated coordination. Fundamentally,
for instance, to plug into the bus, all the components on a DDS network (a “domain”) must
Real-Time Innovations, Inc. 8 Copyright © 2010
agree on topics and types. Even if everyone uses DDS, different groups will choose different
topics and types. And even a single group’s design will change over time. So, to integrate these
systems, we at least have to merge multiple, different DDS domains. Moreover, not all systems
use DDS; we must also merge many different protocols, legacy systems, and enterprise
technologies. DDS alone can’t handle that.
Fundamentally, DDS decouples modules, but not development. It’s a great substrate. But it’s
not enough.
SOA: Decoupled development in the enterprise
Let’s take a step back and look at the successful enterprise technology for integrating systems of
systems: SOA.
SOA stands for “Service Oriented Architecture”. A SOA is a system architecture that builds a
complex system from independent “services”.
If you are familiar with the term “SOA”, you probably know it as the design behind web services.
Web services and SOA are phenomenally successful in the enterprise. Because they enable
decoupled development, SOA and web services dominate today’s enterprise architecture. In
fact, it’s not much of an overstatement to say that SOA is today’s enterprise architecture.
SOA, implemented as web services, integrates the enterprise. Services are independent entities
that implement business functions. Applications that execute as loosely coupled services can be
developed independently and linked later. That’s how a web store can charge your credit card
and arrange shipping via multiple vendors. Those applications weren’t designed together. They
were integrated from independent modules. The web obviously can plug and play components
built by different teams at different times, even using different technologies.
How do web services work? A detailed description is beyond this paper. However,
fundamentally, the key features are crisp interface definitions (WSDL files), known places to get
those interfaces (UDDI servers), and shared type definitions (XML).
How does this compare to DDS? Although the implementation is very different, the analogy to
DDS is striking: both support interface definitions (WSDL v QoS), interface service (UDDI v DDS
topic discovery), and content-aware type sharing (XML v DDS type discovery). These are the
core features of a distributed integration substrate.
The enterprise integration point: ESB
But enterprise SOA has something that DDS does not. At run time, enterprise SOA leverages a
key integration technology: an application called an Enterprise Service Bus (ESB). An ESB runs
on a single logical machine; it is not a distributed concept, despite the “bus” in its name. The
ESB’s function is protocol interchange. Fundamentally, it “routes” incoming messages to the
right service. It can speak many protocols, e.g. SOAP and JMS. It can also translate types
between services (called “mediation”). With these abilities, an ESB can connect independently

Real-Time Innovations, Inc. 9 Copyright © 2010
developed applications, even if they don’t share types or know where to route their requests.
See Figure 4.
Figure 4: Enterprise Systems Leverage an ESB for Integration
Enterprise SOA uses an Enterprise Service Bus (ESB) to route requests to the right
service. It allows development of complex systems built by independent teams at
independent times. The ESB can connect them at runtime.
To integrate independently developed systems, DDS needs the equivalent of an ESB.
Integrating real-time systems of systems
So, if our goal is to integrate real-time systems with each other and with enterprise systems, this
analysis brings up three obvious questions:
• Can we use enterprise SOA technology to integrate multiple real-time systems?
• Can we connect a real-time system to an enterprise system with enterprise SOA?
• Can we use SOA principles to extend DDS to integrate real-time and enterprise systems?
Let’s take a look at each of these questions.
Can we use enterprise SOA to integrate real-time systems?
The first obvious question is if we can just use enterprise ESB technology for real-time systems.
It certainly can integrate many technologies.
Unfortunately, web services and ESBs are woefully inadequate for integrating real-time systems.
They have no concept of timing control. There’s weak QoS control, and the parameters are
wrong for demanding real-time applications. Worse, enterprise SOA systems are centralized for
easy deployment, administration, and management. While the net may look like a “cloud”, the
key components like ESBs fundamentally live in data centers, and you can’t put a data center on
a battlefield (at least, not if you want to win).
And then there’s performance. Enterprise SOAs are just not fast on the scale required to
integrate a combat system or other “real-time” applications. Some web services vendors call
Real-Time Innovations, Inc. 10 Copyright © 2010
their web services “Real-Time SOA”. What they mean by that is a system capable of responding
to web transactions in a second, or perhaps push data out every tenth of a second or so. That’s
fast compared to human response time. But, it can’t control a radar system. Real-time systems
must send thousands or millions of messages a second with sub-millisecond latency. Web
services are way (way) too slow.
And even a fast web service wouldn’t work. Web services don’t model time, so you can’t
request response within an amount of time or find out if it will be late. Real-time is more about
consistency of delivery (“determinism”) that just speed. Radar systems, for instance, flat-out fail
if they deliver data a little bit late. Users will wait a little longer while the system responds.
Incoming missiles won’t.
Enterprise SOA fails in real time systems.
Can we connect a real-time system to an enterprise system with enterprise
SOA?
So, if enterprise SOA can’t connect real-time systems, can it at least connect real-time systems
to enterprise systems? There are certainly many candidate enterprise technologies that could
talk to DDS. Apache Camel, for instance, supports 1000 plug-in protocols. If you want, for
example, to connect a tactical real-time system with its enterprise support environment, why
not just plug in DDS and go?
This is appealing. In fact, RTI tried it. It makes a nice demo…but flat-out failed in real
application. Fundamentally, it doesn’t solve the real problem. To understand why, let’s look at
some of the important differences between real-time and enterprise systems.
Real-Time systems:
• May send millions of messages/second
• Need latency measured in the microseconds
• Must be distributed for redundancy and speed
• Require strict QoS and timing control
• Use fast binary data formats
Enterprise systems:
• Send at most hundreds or a few thousand messages/second
• Expect latency of at least many milliseconds, or even seconds
• Must be managed centrally (administration, backup, etc., are all in data centers)
• Are burdened with layers of business logic support
• Use heavyweight wire data formats like XML
For these and other reasons, enterprise technologies do many things that Don’t Make Sense for
real-time systems. For instance, ESBs normalize messages. Camel translates everything to Java
objects and then back. That’s slow for little benefit in a real-time environment. If you expect
Real-Time Innovations, Inc. 11 Copyright © 2010
the ESB to perform key functions like mediation for the real-time system, it will quickly be
overwhelmed.
So, bridging real-time systems through an enterprise ESB fails for many good reasons. It’s slow.
You lose all timing & QoS information. It imposes single points of failure and choke points.
Bottom line, it’s fundamentally the wrong end to fix problem. It just doesn’t make sense to
connect the real-time system directly through an ESB.aragraph header
Can we use SOA principles to extend DDS to integrate real-time and enterprise
systems?
So, DDS is missing the key ESB-like functionality, “routing”. Can we do that in a way that’s
compatible with the reality of real-time demands? That’s an interesting proposition. It defies
the “conventional wisdom” of just slamming all the integration load onto the ESB. But as we’ve
seen, DDS is also a powerful integration substrate. And it has the key advantages of being
fundamentally distributed and fast. So…can we build a fast, distributed analog of an ESB?
Real-time Routing
Connecting DDS domains
Let’s consider the simplest problem first: say we have two DDS applications, maybe a radar
system and a display system. Now, obviously, it would be best to design them together, use a
single DDS bus, and connect cleanly through shared types, topics, and QoS parameters. Then
we could develop a high-performance, reliable platform by starting with solid data-centric
design principles that encompass the whole application.
But, let’s assume that’s not possible in this case. These are big systems involving many
applications each. They were originally developed for other uses; perhaps we are “borrowing”
the display subsystem from a ship architecture, and merging it with a radar from a ground-based
anti-missile system. Perhaps these systems are modules that must be used in more than just
our one application, and those other uses have other requirements. Or maybe the radar is a
very new technology that we’re trying to integrate into our ship, to keep it affordably
competitive.
So, our challenge is to reuse Big Modules that were developed independently, even by other
teams or other companies at other times. As every program manager knows, this is a common
desire. (And the customer rarely understands why it’s so hard or expensive.) Unfortunately,
reuse is usually an unfulfilled dream (hallucination); integrating two large systems that were not
designed to work together is a famously frustrating exercise.
Real-Time Innovations, Inc. 12 Copyright © 2010
Routing service
How can we effectively connect our two independent DDS domains? What would such a routing
service need to do?
Without a routing service, the only way to connect domains is to build a custom “bridge” that
knows exactly what data to pass, subscribes to it, translates it for the other side, and publishes it
with the schema and topic names that the other side expects. This is doable. However, custom
bridges are expensive to write and maintain.
Our routing service clearly needs to bridge packets between the networks. But to do routing
generically, our service needs to provide two key functions in configurable form: guards and
translators. Then, it needs to connect to both domains, find the right data, and route it to the
right destination.
Guards
Guards decide what our subsystems will export. Obviously, the display does not need access to
every single piece of data flying around in the radar system. It only needs tracks (in our
simplified example). The guard’s job is to select just that information and expose nothing else.
It can also change the QoS of the exported information; perhaps we want to control our
commitment to external systems. So, a guard is a filter that intelligently allows only the right
information through to the other side.
Importantly, the guard is also an obvious security point. Because the routing service controls all
information entering or leaving the system, it is a key opportunity to provide security. That is
critical, but beyond this paper.
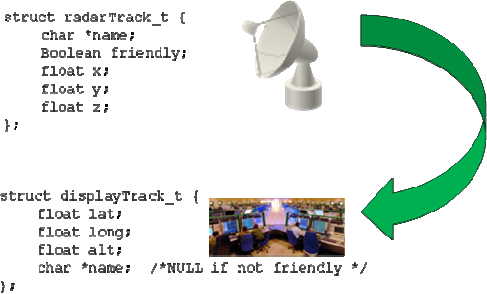
Translators
Secondly, we need to transform languages between the systems. Our radar and display both
understand the concept of “tracks”, but suppose the radar publishes tracks in X-Y-Z position
relative to its location, while the display expects latitude and longitude (see Fig 5).
Real-Time Innovations, Inc. 13 Copyright © 2010
Figure 5: Translation and Guarding are the Key Integration Functions
Any system that must connect independently developed components must translate
between the data types on each end. It also must know what information to expose.
The only alternative is an expensive rewrite of one of the end applications.
This is indeed a very simple example. Real track data structures can have hundreds of fields.
The concepts are unchanged; the translator must match the topic names and type schemas on
both ends.
Tap into discovery on both sides
So how can we do these steps generically? The routing service must be able to find the right
information within the network and publish it to the other side. Since our routing service can
tap into DDS automatic discovery, finding information is manageable. The routing service must
also understand and process topics and types. Since DDS is content aware, these functions are
implementable. The translators become simple scripts or plugins for each schema processed.
Guards become configuration scripts that specify which topics to translate. As a bonus, DDS
content awareness means that the routing service checks all types at runtime; the system can
thus work safely in an environment where the schema may change. RTI has implemented such
a routing service; it is configured via XML scripts.

Real-Time Innovations, Inc. 14 Copyright © 2010
Figure 6: RTI Routing Service Connects Domains
RTI Routing Service connects two DDS domains. It implements both guarding and
translation. The guard selects which data will be exported from the domain. The
translator matches topics and schema between domains. It can find the data it needs
via DDS discovery.
Leverage easy distribution to make it scale
Now, suppose we want to integrate multiple DDS domains. An ESB-like approach would imply
that we should expand our routing service to process multiple DDS data streams. However, with
the DDS bus available, there’s no need for a monolithic ESB. We can just instantiate more
routing services, and distribute them around the system as needed. That’s a much faster and
more robust design. We can even have multiple routing services between single pairs of
domains for redundancy.
Build DDS into a real-time distributed ESB
This last point is suggestive of a bigger solution. Of course, Routing Service (RS) can do more
than just connect using the DDS protocol. We can extend it with plug-in protocols. Then it can
connect DDS domains through TCP, for example. This allows DDS to cleanly traverse firewalls.
The plugin can encrypt traffic. Thus, we can securely span WAN networks.
We can take this even further. The RS can connect DDS to non-DDS systems. With plugins, the
RS can be a programmable bridge to any protocol, e.g.: Link 16, STANAG 4586, JMS, C37.118,
compressed DDS streams, and many others. Each RS, running a plugin, can integrate another
protocol into the system. Of course, DDS makes it easy to have many of these. Each can run on
a separate node. The result? An efficient, distributed integration design.
Besides combining protocols, DDS can be used to integrate other technologies. For instance, RTI
has DDS services to integrate databases, web services, and tools like Excel. A JMS API on the
middleware can offer clean and easy integration with enterprise technologies. The JMS API with

Real-Time Innovations, Inc. 15 Copyright © 2010
guarding can also interface more cleanly—without the intermediate “normalization” step—with
enterprise ESBs (like Camel).
Together, we could call design a “Real-Time Service Bus”. It fulfills the same function and
delivers the same benefit as an Enterprise Service Bus, except that it’s fundamentally
distributed, fast, and timing aware. Modules can live on any node to integrate any technology.
The Real-Time Service Bus provides the integration “point” that DDS was missing, in a
distributed architecture.
Figure 6: A Real-Time Service Bus
By adding protocol plug-ins and enterprise technology adapters, DDS becomes the
substrate for a Real-Time Service Bus that functions as a “distributed ESB”. It delivers
the key benefits of real-time SOA without the disadvantages of web services
implementations.
So is that Real-Time SOA?
This brings the key benefits of a SOA to true real time
The architecture outlined here is certainly a service-oriented architecture (SOA) by the formal
definition. With RTI’s powerful Routing Service, designers can build real-time systems from
many independent services.
More importantly, it delivers the key decoupled-development benefit. Services, even entire
DDS or other applications, can be developed by separate teams, at different times, with
different designs. The translation function allows them to then be integrated later. If a
component evolves (and this is key) only the translation configuration needs to be adjusted.
We will repeat that the innovation here is vastly different from what enterprise vendors call
“Real-Time SOA”, which really means faster web services. The DDS-based Real-Time Service Bus
is a SOA that truly integrates a real-time system of systems. And, it satisfies demanding

Real-Time Innovations, Inc. 16 Copyright © 2010
performance, reliability, and control needs. With protocol plugins and other technology
interface components, it takes this a step further. It allows the development of complex
systems that include both real-time and enterprise components. It integrates large real-time
systems with each other and with enterprise systems.
Even lying on the bottom of the Pacific, the Valley Forge can still serve software designers. Its
lessons? Integration is key. Architecture enables integration. Real-time systems require real-
time technology. And emerging real-time technology can deliver the levels of integration that
can prevent this waste in the future. The key lesson: designing for integration from day one with
the right approach is perhaps the most important consideration in building and maintaining
affordable distributed systems.
Next steps
To learn more about RTI Data Distribution Service or to download a fully-functional software
evaluation, please contact us at info@rti.com or visit http://www.rti.com.
i
Admiral Frick, PEO IWS, at the 2006 ASNE Combat Systems Symposium
ii
Figure modified from Raytheon talk at OMG DDS Day seminar.
iii
All performance results in this paper are dependent on the right implementation. RTI publishes copious
data and numerous studies comparing middleware implementations at www.rti.com.
iv
DDS also allows interoperation across operating systems, languages, even DDS implementations. No
other middleware standard does all that either, but that’s beyond this paper.
